 Avec
ce nouveau Robot, j'ai tenu à faire une séance photo
complette de la fabrication, suite à la demande de
plusieurs personnes.
Avec
ce nouveau Robot, j'ai tenu à faire une séance photo
complette de la fabrication, suite à la demande de
plusieurs personnes.
Je ne donne pas de côtes précises,
tout dépend des pignons, moteurs etc... trouvés.
ceci st juste un guide pas à pas permettant de comprendre
comment Volvo et Rolly ont étés fabriqués. La
méthode est simple et vous pourrez facilement l'utiliser.
Pour les circuits éectroniques, ces deux Robots
utilisent des circuits de mon ami Math Vos
(http://home.wanadoo.nl/m.m.avos/
), son site est bourré de circuits adaptables facilement,
construits sur des plaques de prototypage (à trous).
Ce robot est une très bonne base pour développer
des circuits car il offre une grande place et un accès aisé
à l'électronique.
Tout d'abord l'outillage :
- une perceuse (sans fil c'est
mieux !)
- une scie (metaux) les chanceux auront une scie à
chantourner mais ce n'est pas indispensable.
- une lime
-
pinces, tourne-vis etc...
- de la colle epoxy (2 composants
comme Araldite...) sinon Cyano (loctite).
- et le matériel
basique pour souder.
Fournitures utilisées :
- morceau de polycarbonate
de 5mmm d'épaisseur (ça ne casse pas quand on le
coupe !).
- 2 jeux de pignons (chez Conrad réf.: 29 74
02-33 6€20 les 2).
- 2 moteurs (chez Conrad réf.:
24 44 06-33 5€ les 2)
- 1 tige fibre de verre 3mm de
diamètre pour les axes (mais n'importe quoi d'autre sera
OK)
- 2 roues récupéré sur un jouet + 1
roulette prise sur un vieux balladeur.
- 2 porte-piles.
-
une plaque "pastillée" pour le circuit.
Le chassis est constitué de deux pièces latérales en polycarbonate dans lesquelles passeront tous les axes des pignons et qui supporteront aussi les moteurs, une troisième pièce servira de liaison recevra les accus et l'électronique.
1 préparation des cotés : 
Morceaux de polycarbonate, 1 pièce latèral est
déjà percée, l'autre sera vissée
dessus afin
de percer au mêmes endroits.  percr
un trou et mettre les premiers pignons
percr
un trou et mettre les premiers pignons
entraînés
par le moteur (vissés avec une vis de 3mm). 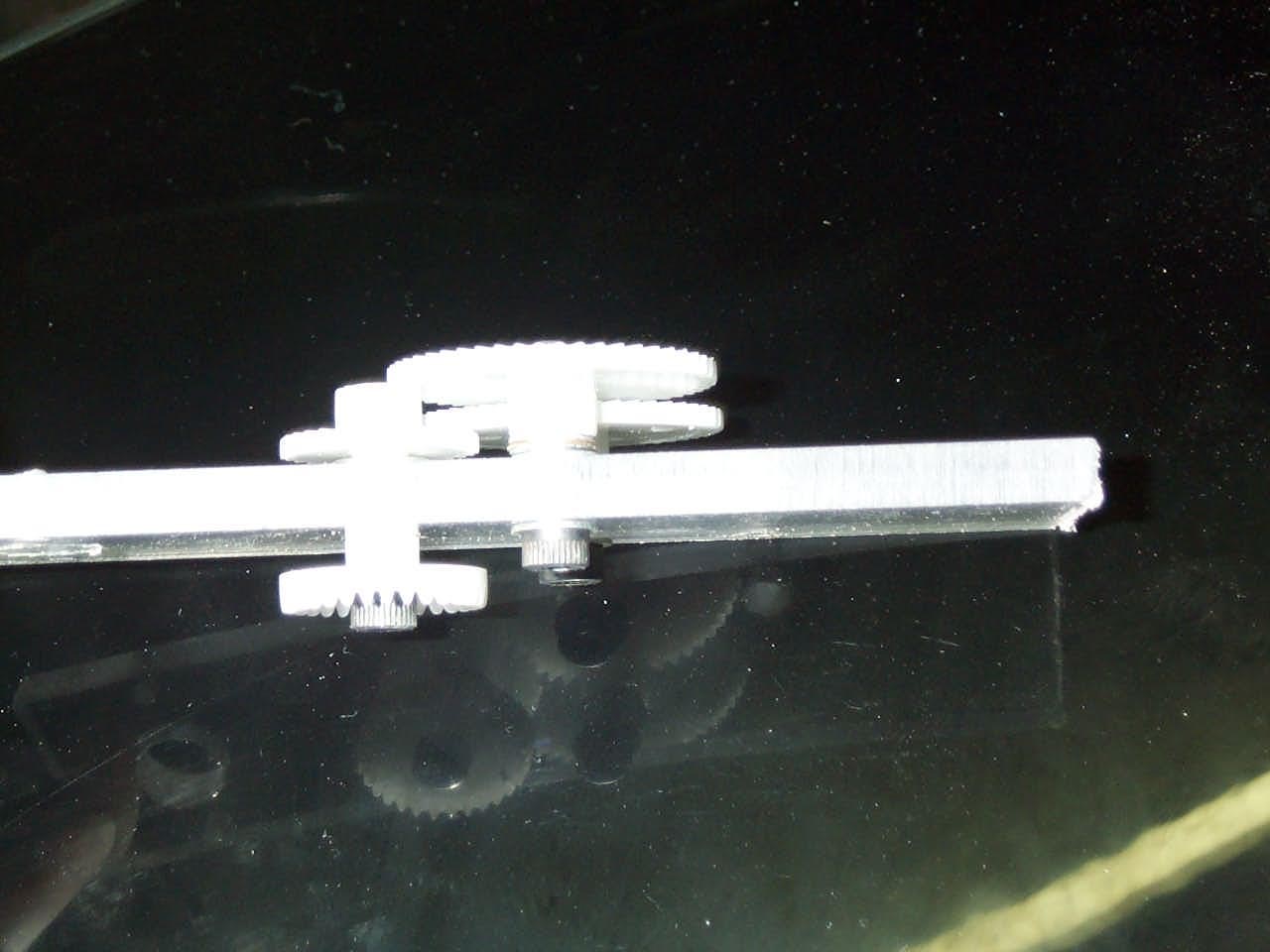 présenter
le deuxième, marquer le trou puis percer
présenter
le deuxième, marquer le trou puis percer
à
3 mm.  monter
le pigon avec une vis de 3mm et répéter
monter
le pigon avec une vis de 3mm et répéter
l'opération avec les pignons suivants 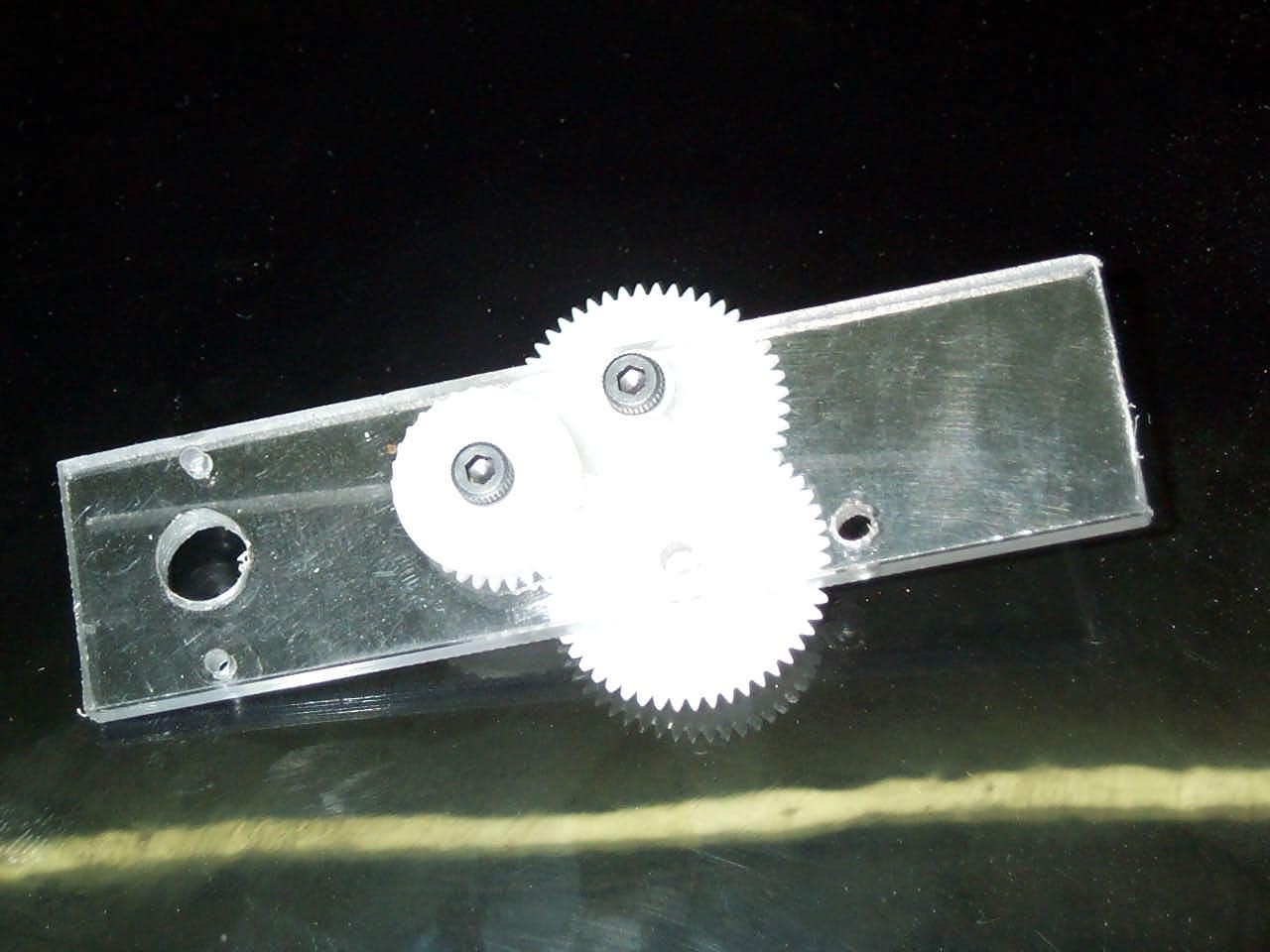 Fixer
les pignons avec des vis, ne pas les serres
Fixer
les pignons avec des vis, ne pas les serres
afin que la
rotation soit facile (le trou libre sur la photo est celui de
l'axe des roues). 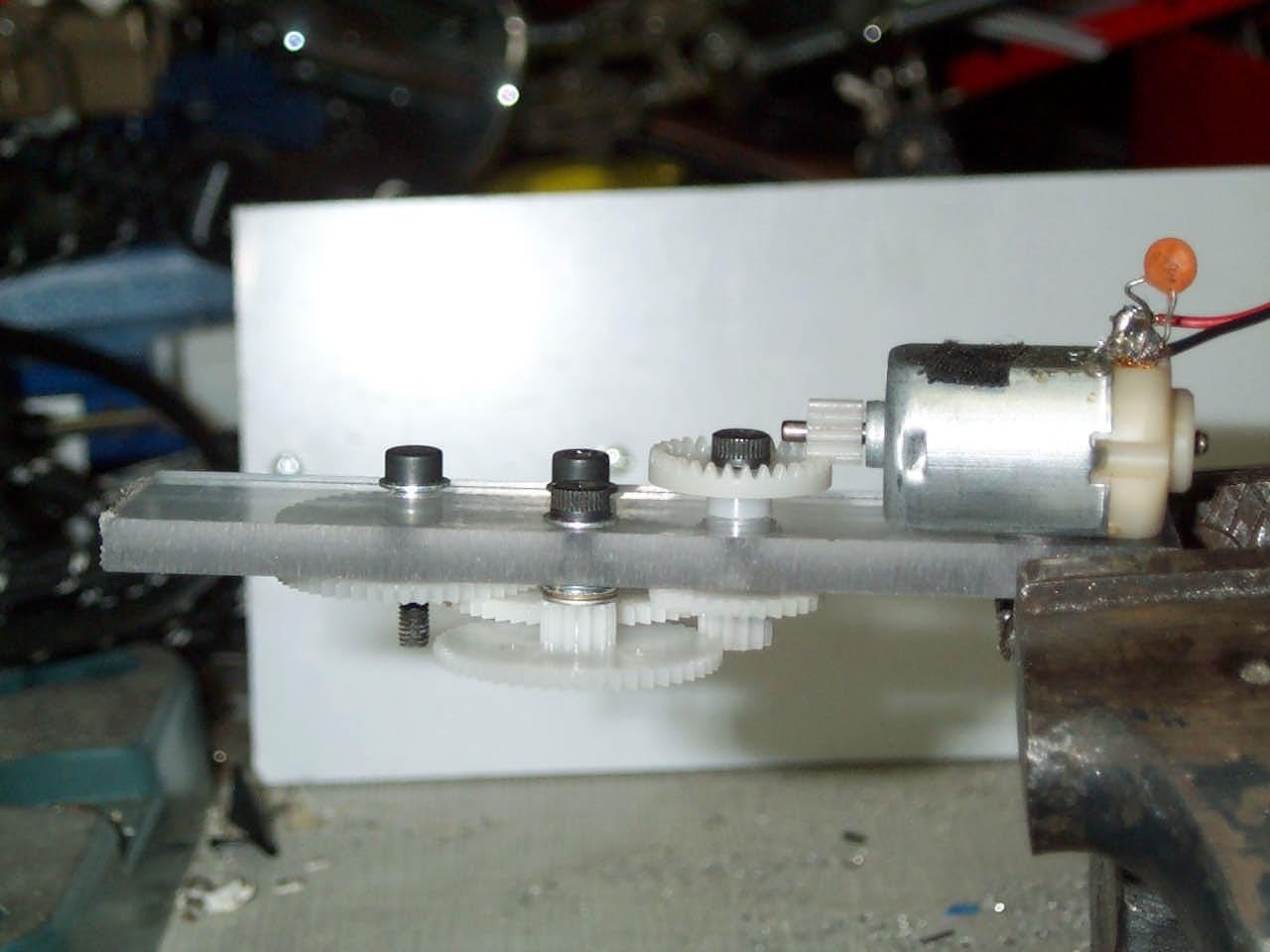 On
peut maintenant essayer une transmission, si besoin
On
peut maintenant essayer une transmission, si besoin
ovaliser
des trous pour que le jeu entre pignons soit suffisant.  Redémonter tout, visser le deuxième coté sur
la pièce finie et percer les trous au même endroit en
vous servant de la pièce finie comme modèle.
Redémonter tout, visser le deuxième coté sur
la pièce finie et percer les trous au même endroit en
vous servant de la pièce finie comme modèle. 
Couper puis limer les deux pièces à la même
taille.
 découpe
des passages des pignons dans la pièce médiane
découpe
des passages des pignons dans la pièce médiane
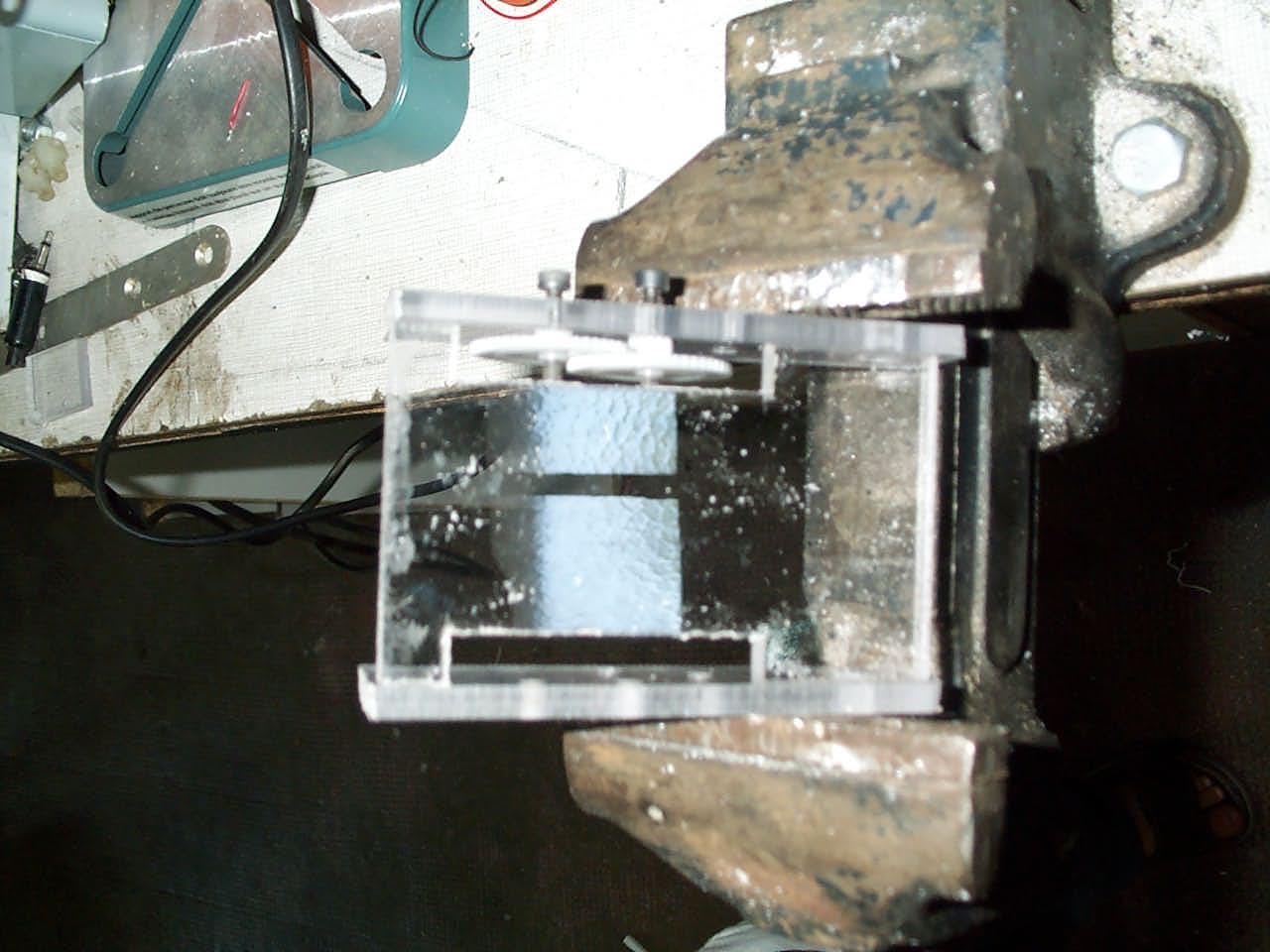 collage
epoxy des deux cotés percés sur la pièce
médiane.
collage
epoxy des deux cotés percés sur la pièce
médiane.
ATTENTION ! La pièce médiane est
collée à la hauteur des axes des roues et des
pignons juste avant.
Après collage, se guider des
perçages éxistants et faire des avant-trous dans
cette pièce, les axes des roues et pignons seront ainsi
guidés des deux cotés et supporteront mieux les
efforts demandés. ![]() Remonter
la transmission et coller le moteur
Remonter
la transmission et coller le moteur
(si besoin, caler
sous le moteur ou limer le pignon entraîné pour
obtenir un jeu suffisant).
Le mouvement doit être très
libre. graisser légèrement.
ATTENTION ! La pièce
médiane est collée à la hauteur des axes des
roues et des pignons juste avant.
Après collage, se
guider des perçages éxistants et faire des
avant-trous dans cette pièce, les axes des roues et pignons
seront ainsi guidés des deux cotés et supporteront
mieux les efforts demandés.
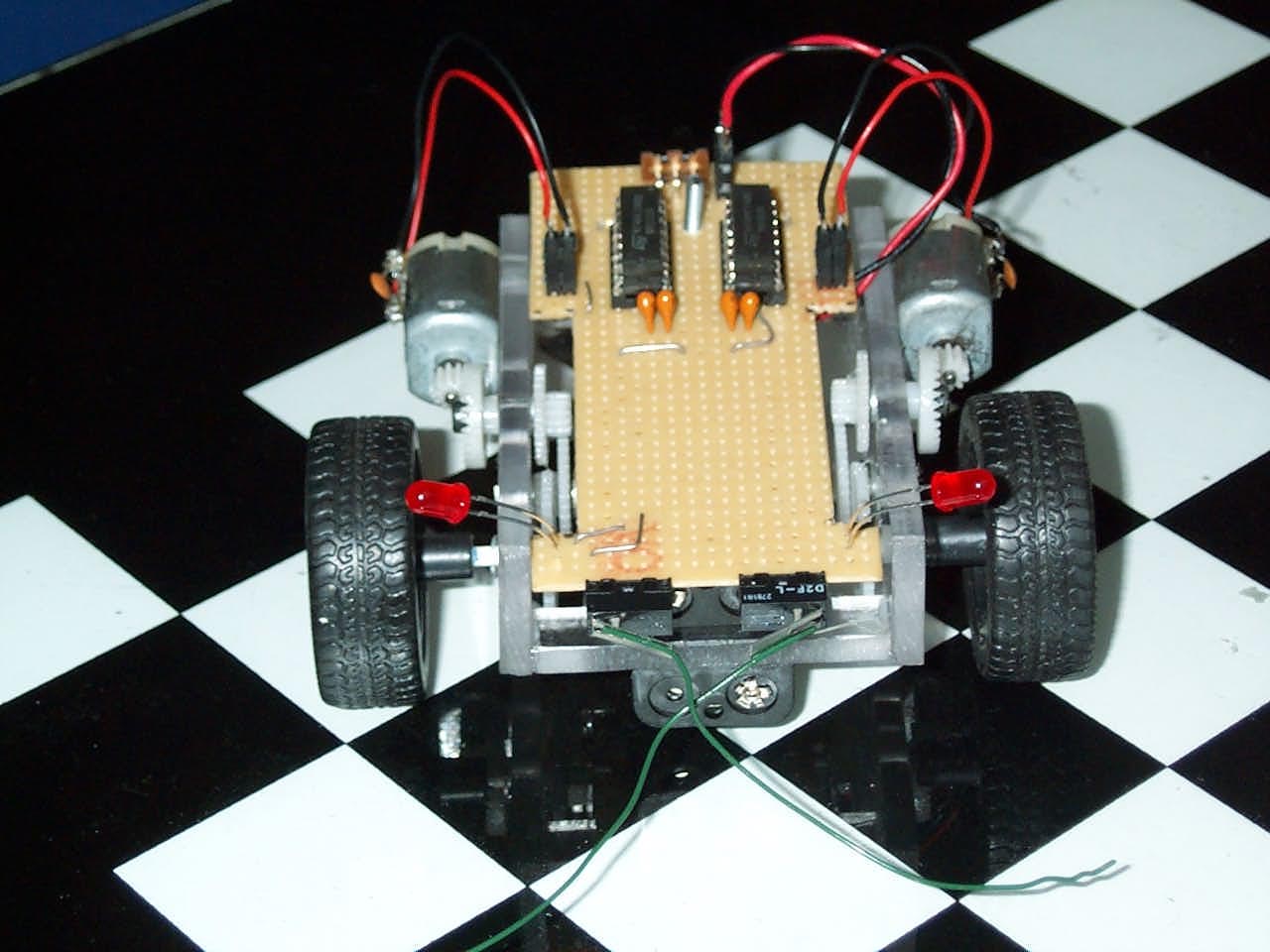
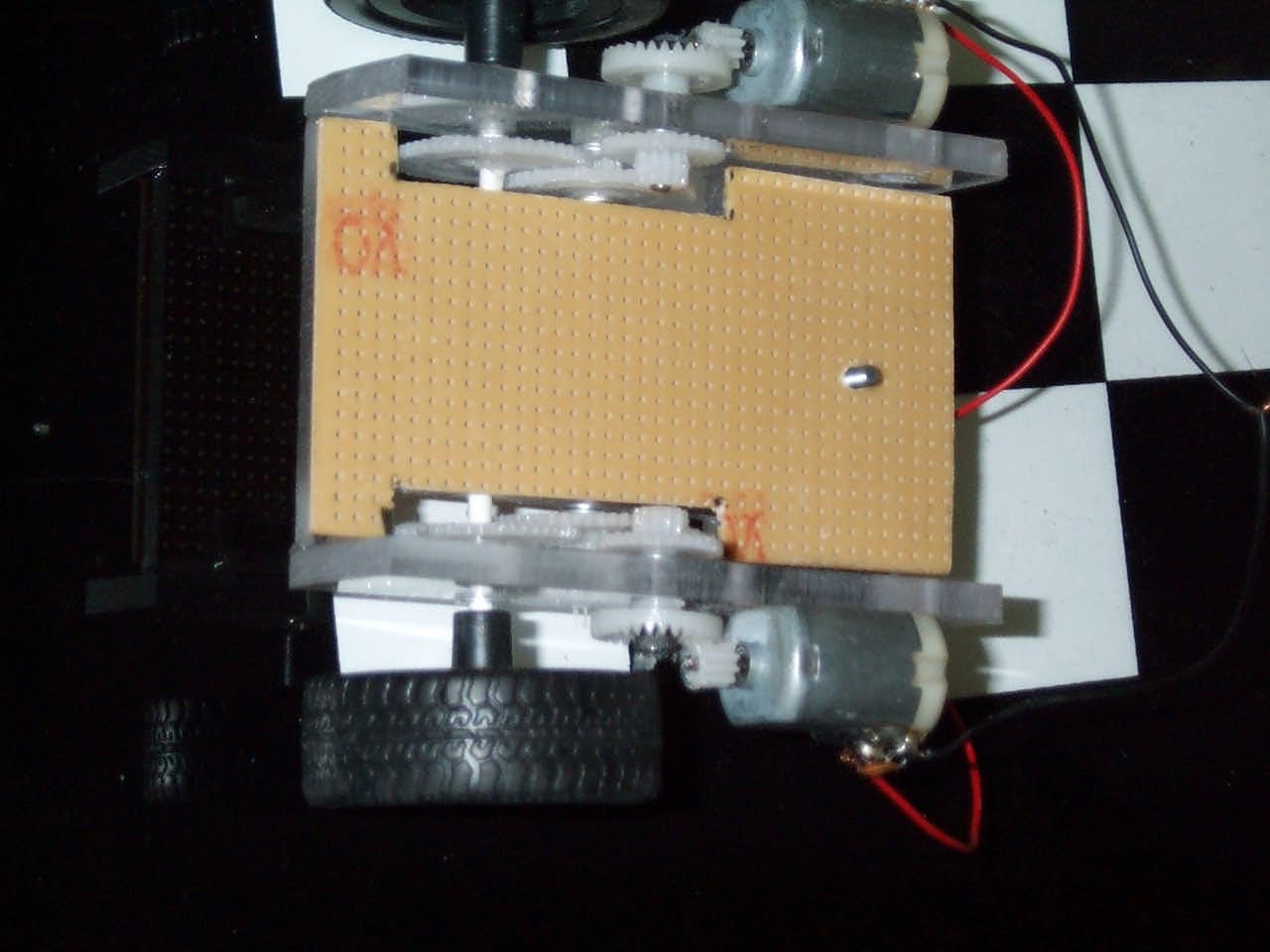 préparation
du circuit (découpe des passages des pignons
préparation
du circuit (découpe des passages des pignons
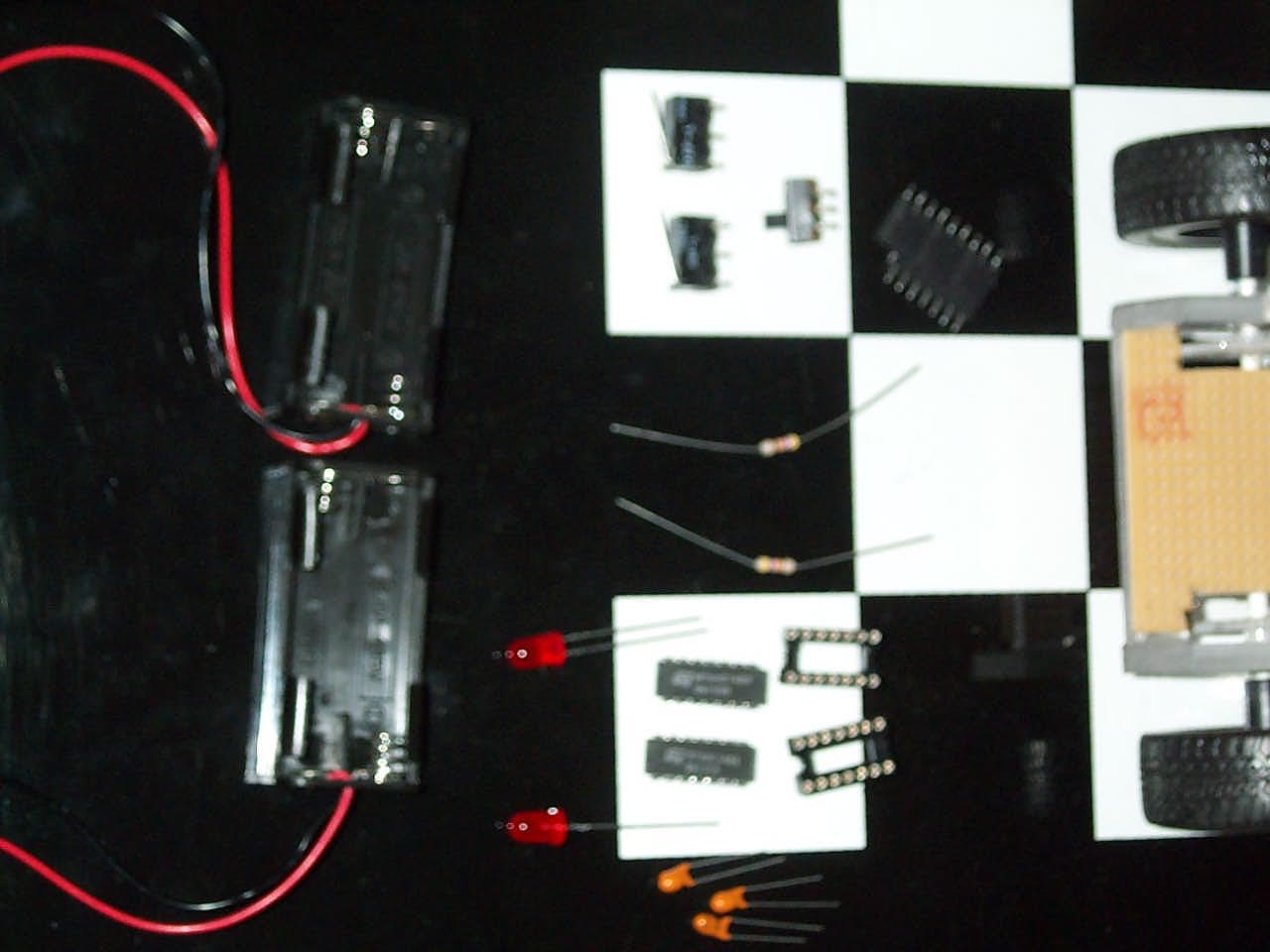
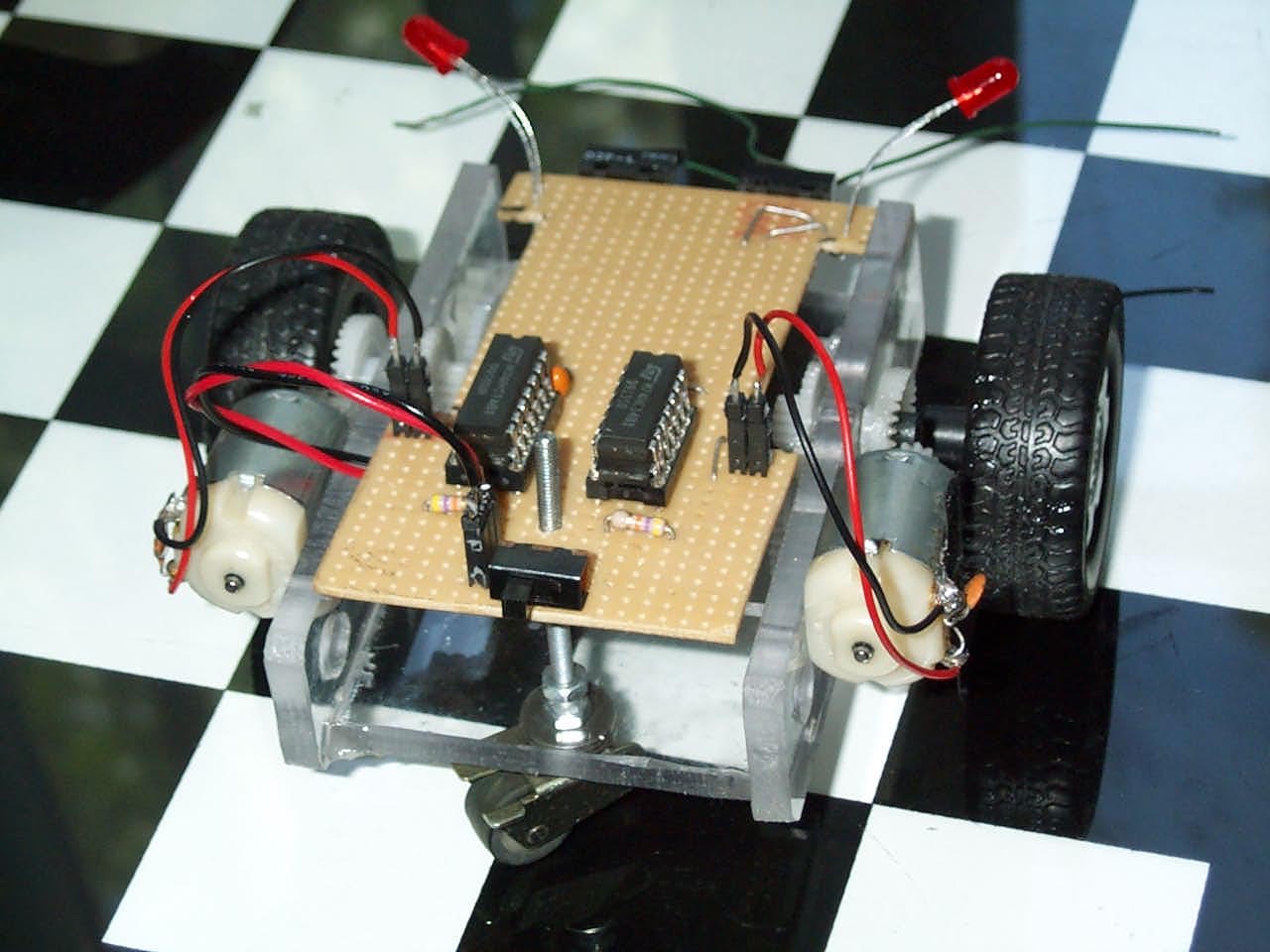
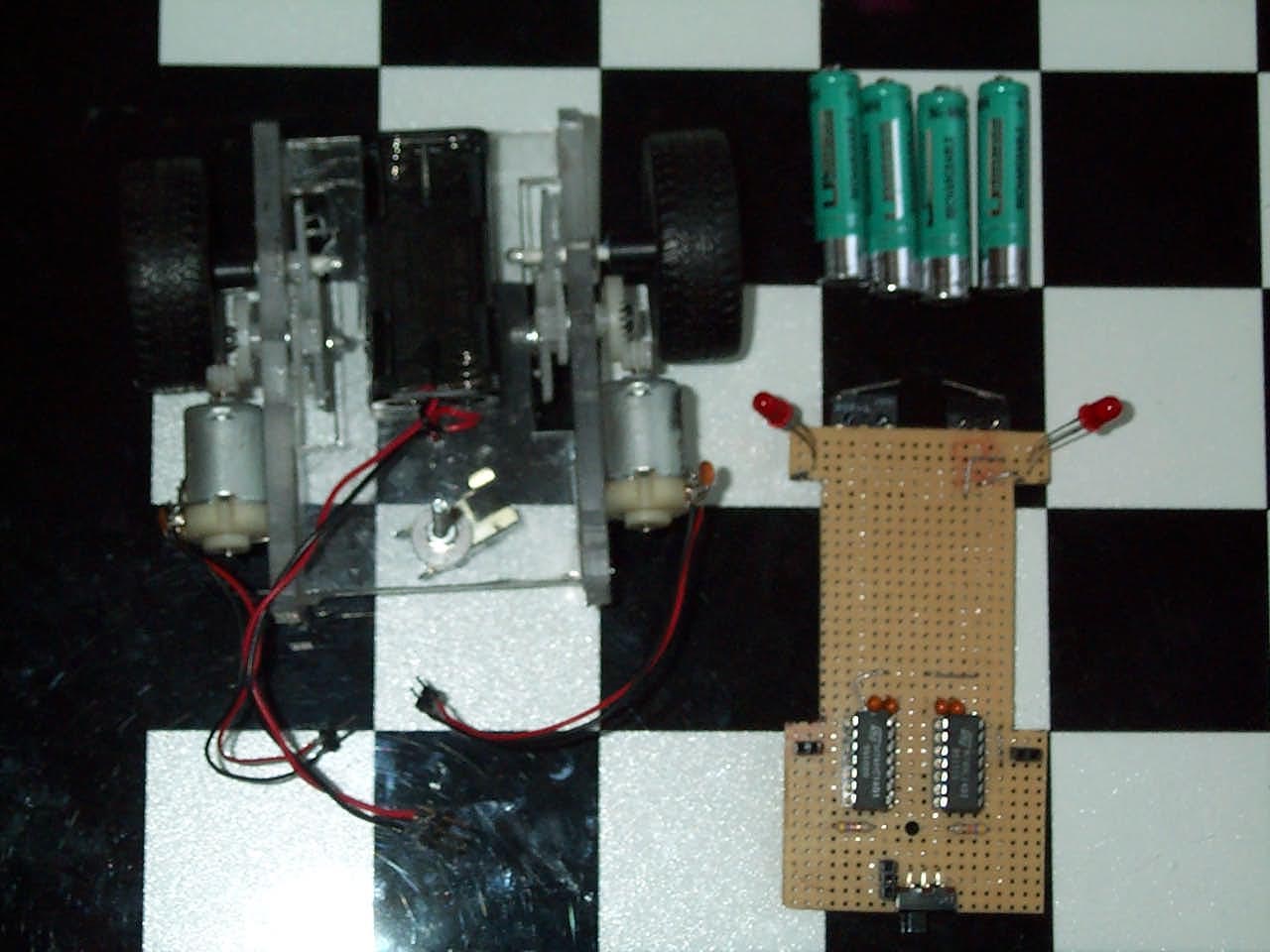 electronique
términée !
electronique
términée !